Table des matières
#20211223 - F4FWH : Reprise via wayback machine de l'archive du frama.wiki qui a fermé depuis.
Bienvenue sur le Wiki du projet Eonef / HAND / FR-EMCOM / L'Hermitage !
Présentation du deuxième WE du 20 et 21 Juillet 2019
Le site de l'HERMITAGE LAB

le ballon EONEF
EONEF conçoit et fabrique une plateforme aérienne autonome en énergie qui prend la forme d'un ballon à hélium et permet de déployer un réseau télécom ou d'observation aérien en moins de 30 minutes sur des sites isolés.
Ce ballon a été conçu pour embarquer des systèmes de télécommunication et d'observation mais peut aussi intégrer d'autres capteurs. Couplé à des panneaux solaires et des batteries les fonctionnalités bénéficient de l'autonomie nécessaire pour couvrir une missions. La plateforme peut voler en autonomie pendant plusieurs semaines voire mois.
Nous intervenons post-catastrophe climatique pour rétablir un réseau de communication, sur des missions scientifiques pour suivre des populations animales sur des zones reculées ou encore sur des sites industriels et des évènements de plein air sur des volets de sécurité.
Schéma conceptuel du ballon :

Contact : [email protected] (cofondatrice)
Contraintes opérationnels
- Le ballon ne pourra pas évoluer à une altitude supérieure à 150 mètres
- Les évolutions seront possibles de 5h32 à 22h20
Afin d'optimiser les expériences, 2 nacelles de type rigide et une de type souple seront à disposition. Elle permettront d'optimiser les temps de vol en échangeant les nacelles au sol.

150 mètres plus haut ….

Déroulé des journées
Voici idéalement le déroulé prenant en compte les temps de trajet des plus éloignés
Samedi 20 Juillet
- 10h00 : arrivée Hermitage
- 10h00 - 10h30 : briefing + café accueil
- 10h30 - 12h00 : mise en place du hackerspace
- 12h00 - 13h30 : Déjeuner
- 13h30 - 20h30 : montage - test
- 20h30 - 22h00 : Diner
- 22h00- xxhxx : libre (mais manip radio serait sympa)(un petit passage sur la réception SDR ??)
Pour mémoire Déroulé du Samedi 20 Juillet
Dimanche 21 juillet
- 08h00 - 09h00 : Petit déjeuner
- 09h00 - 13h30 : montage - test
- Reprise tests de la veille qui ne seraient pas terminés
- Trames 433/868 Mhz
- créneau radioamateurs
- 13h30 - 15h00 : Déjeuner
- 15h00 - option (test - repli - etc)
Pour mémoire Déroulé du Dimanche 21 Juillet
Partie radio (& radioamateur)
Le but du projet est de tester les possibilités, mais surtout les avantages, d'embarquer du matériel radio et radioamateur à bord du ballon captif. Bien sur pour pouvoir mesurer l'amélioration de la couverture radio.
Dans le projet il est prévue de tester cela sur des fréquences professionnelles mais aussi sur des fréquences radioamateurs.
Scénario
Lors d'une catastrophe naturelle ou d'un événement, le ballon EONEF est déployé avec à son bord différentes technologies de communication et de réception de données. L'objet de cette expérimentation est de déterminer si la hauteur de vol du ballon permet d'augmenter sensiblement la portée des systèmes embarqués dispensant de multiplier le déploiement d'infrastructure au sol (réduction d'empreinte). Le ballon serait déployée aussi du centre de crise local qui rediffuserait ensuite vers un centre régional et /ou national.
Ils participent au projet
- Hand : Site internet de l'association, @HANDHACKERS
- FR-Emcom : Site internet de FR-Emcom, @fr_emcom
- Fablab de Jarry https://www.facebook.com/lefablabdejarry/
- Bruno Dirops HAND : Site Internet personnel, @B_DSN
- Vivien F4FWH : Site internet personnel de Vivien, @F4FWH
- Frédéric F4EED/KI7QQP : Site internet personnel de Frédéric, @F4EED,https://www.youtube.com/user/fredericf4eed/featured
- Arnaud F4EIR : @F4EIR
- Florent F4HZO
- Nicolas F4HTN @F4HTN
- Geoffroy F4HOF @ISITHRAN
- Cem F4CGU @CemCARFIL
- Alexandre
- @myst404 GitHub
- Daniel
ATTENTION RAPPEL IMPORTANT pour les RADIOAMATEURS
L'IARU est organisée en trois régions: 
- Europe, l'ouest du Moyen-Orient, Afrique, le nord de l'Asie.
- Amériques et au Groenland.
- Océanie et la plupart de l'Asie, (Australie, des îles du Pacifique, plus Hawaï).
Les plans de bandes radioamateur par région
Alimentation électrique
- Choix :
- batterie type recharge téléphone (tous doit partir d'une tension d'alimentation de 5V) ?
- batterie 12V (prévoir des convertisseurs pour la partie nano ordinateur)
- Peut-être voir les batteries de modélisme, car ils ont des contraintes de poids également (typiquement des Lithium Ion Polymère par exemple)
- Exemple batterie Trust 16000 mAh
- Poids : 440g
*Ce qui a été utilisé : Batterie type recharge de téléphone (Powerbank)
Pistes d'expérimentations sur le SDR distant
Afin d'expérimenter divers modes en parallèle, nous émettons l'idée de n'utiliser le Rpi que pour gérer les clé RTL (plusieurs par Rpi) et de connecter les flux vers une machine plus puissante au sol via une connexion wifi et des utilitaires comme RTL-TCP.
Merci Fred pour le LIEN cela pourrait être une aide ou un début de piste. Une autre piste LIEN
Quelques test ont été effectués par F1IVT sur les débits nécessaires.
- rtl_tcp: Il s'avère que rtl_tcp envoie un flux I/Q complet, et il est donc difficile de descendre en dessous de 2 Mbps par flux radio. Avec une réception en 250 ks, on a un flux constant à 4 Mbps.
- spyserver: Quelques tests ont été effectués avec spyserver sur le Raspberry Pi et le débit est nettement plus utilisable (quelques dizaines ou centaines de kbps). Par contre, il est nécessaire d'utiliser le logiciel SDRSharp en client, et ce dernier fonctionne sur Windows. Il est visiblement possible de le compiler sur GNU/Linux à l'aide de Mono, mais le test n'a pas encore été fait. Il n'est pas possible de faire marcher SDRSharp sur MacOS (problème de mono 4.5 qui ne fonctionne pas en 64 bits sur le Mac). UPDATE: La version compilée sur Linux de SDRSharp ne contient pas le client réseau. Donc ça ne marche pas.
Écoute distante de la réception SDR
Disponible ici: sdrdistant
Conclusion: L'idée était là mais il est apparu qu'elle est difficile de la mettre en place pour les problèmes de bande passante et de stabilité de la liaison wifi entre le ballon et le sol. D'autres solutions ont germé dans les têtes de certains. A suivre …
LORA
- But : permettre la mise en place du protocole LORA pour permettre de connexion des objets connecté au sol en eux.
- Scénario : lors ou avant d'une catastrophe naturelle ou événement, permettre la création d'un réseau de capteurs dont les données seraient partagées et mises à profit de systèmes d'alerte par exemple (sismographes, marégraphe, etc.
- Matériel :
- Poids des modules :
Lien vers le projet project_owl à base de modules LoRa. Lead : Daniel

LoRa PROJECT OWL
Date de la démo: Samedi 20 juillet 2019
Présentation du projet
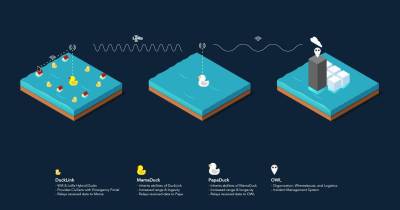
Test d’une version réduite d’une installation « ClusterDuck » du projet « http://project-owl.com »
Ce projet est destiné à fournir un moyen simplifié de communication d’urgence lors de catastrophes naturelles quand les autres réseaux de communications (GSM / 4G) sont saturés ou inopérants.
Ce système basé sur la technologie LoRa et ESP32 est simple et rapide à mettre en place pour la partie « Clusterduck »
La configuration est aisée et le matériel nécessaire est pas cher et largement distribué dans la plupart des stores en ligne (Amazon / Ali express / Banggood)
Les cartes utilisées dans le cadre de cette démo sont les cartes WiFiLoRa32 de chez Heltec en version 868Mhz
La préparation est assez facilitée et ne demande qu’un minimum de préparation.
- L’IDE Arduino (Version 1.8.9 a la date de la demo)
- Le package ESP32 (Version 1.1.2 a la date de la demo)
- Les librairies nécessaires a la compilation : Comment installer les librairies
- LoRa par sandeepmistry (Version 0.5.0 a la date de la démo)
- ArduinoJson(Version 5.11.31 a la date de la démo, V6 et supérieure incompatible)
- U8G2 et U8Glib
- PubSubClient
Conclusion:
ADSB / AIS
Lead : Vivien
L'ADSB
- But : permettre la localisation du trafic aérien sur un fond de carte
- Scénario : lors d'une catastrophe naturelle ou d'un événement, ce système permettrait d'informer le centre de crise du trafic aérien autour de la zone. Il permettrait notamment de synchroniser les phases logistiques.
- Matériel :
- Poids des modules :
- nano ordinateur (raspberry pi, orangepi,...): 29g (pour un raspberry pi 3a+); 44g (raspberry pi2, 9g (raspberry pi zero)
- Filtre 88-108 MHz : 21g
- antenne 1090 MHz : 7g
- Logiciel :
{kind=link}
- Afin de comparer entre la station dans le ballon et une station de réception sol, la station sol est basé sur cette solution :
- Obligatoire
- ou tous autre fork
- Commentaire: technologie déjà maitrisée
- Testé
Procédure installation :
- Liste numérotéeInstaller Rasbian stretch : https://www.raspberrypi.org/downloads/raspbian/
- Installer dump1090 sur le raspberry; en mode terminal lancer les commandes suivantes :
- sudo apt-get update
- sudo apt-get install -y git build-essential debhelper rtl-sdr
- sudo apt-get install -y librtlsdr-dev libusb-1.0-0-dev pkg-config
- sudo apt-get install -y fakeroot curl cron lighttpd
- sudo mkdir ~/build-dump-mut
- cd ~/build-dump-mut
- sudo git clone https://github.com/mutability/dump1090.git
- cd ~/build-dump-mut/dump1090
- sudo dpkg-buildpackage -b (soyez patient)
- cd ~/build-dump-mut
- sudo dpkg -i dump1090-mutability_1.15~dev_*.deb
- sudo lighty-enable-mod dump1090
- sudo /etc/init.d/lighttpd force-reload
- sudo dpkg-reconfigure dump1090-mutability
- pour la plus part des utilisations accpeter les valeurs par défaut en appuyant sur la touche entrée.
- pour les valeurs suivantes entrez les valeurs comme indiqu ce dessous:
- (a) RTL-SDR dongle to use: 0
- (b) Votre latitude de réception (au format décimal): xx.xxxx
- © Votre longitude de réception (au format décimal): yy.yyyy
- (d) Interface address to bind to (blank for all interfaces): remove default 127.0.0.1 and leave blank.
== Correction d'un bug sur raspbian strech : ==
- sudo wget -O /etc/udev/rules.d/rtl-sdr.rules “https://raw.githubusercontent.com/osmocom/rtl-sdr/master/rtl-sdr.rules” * sudo reboot
Avantage du ballon :
- la montée en altitude du récepteur permet de voir les avions qui volent loin à faible altitude (apparition dès 175 pieds – environ 55m – constatés sur Roissy CDG)
Log:
- Log de la station sol sur la journée de samedi : Log ADS au sol 20190720
- Log de la station sol dans la journée de dimanche : Log ADS au sol 20190721
- Log de la station sol dans la journée de samedi en paralèlle du ballon : Log ADS au sol 20190720 en paralèlle du ballon
- Log de la station ballon dans la journée de samedi : log.txt.pdf (télécharger le fichier et l'ouvrir dans un éditeur de texte)
L'AIS
Description de l'AIS * But : permettre la localisation du trafic maritime sur un fond de carte * Scénario : lors d'une catastrophe naturelle ou d'un événement, ce système permettrait d'informer le centre de crise du trafic maritime autour de la zone. Il permettrait notamment de synchroniser les phases logistiques. * Matériel :
- nano ordinateur (raspberry pi, orangepi,…)
- clef SDR (type nooelec avec TCXO)
- Récepteur AIS marine Em-track R100
- Filtre 88-108 MHz
- antenne 1090 MHz
- Antenne Marine
* Poids des modules :
- nano ordinateur (raspberry pi, orangepi,…) : 29g (pour un raspberry pi 3a+); 44g (raspberry pi2, 9g (raspberry pi zero)
- clef SDR (type nooelec avec TCXO) : 30g
- Récepteur AIS marine Em-track R100 : 120g
- Filtre 88-108 MHz : 21g * antenne 1090 MHz : 7g
- [F4EED] je verrais mieux des dipoles ADSB
- Logiciel :
- Raspbian
- Kplex (multiplexer NMEA)
- OpenCPN
- Resource sur les alarmes * Description - ou tous autre fork
Autres logiciels AIS
- Autre logiciel sous Rpi Avantages ? Inconvénients ?
- Testé sur le weekend, mais impossible d'avoir des données et de se connecter sur le flux des positions.
- Site avec plein d'info et de softMarine Traffic
Avantage du ballon :
- la montée en altitude du récepteur permettrais de voir les bateaux depuis une plus grande distance en dégageant le récepteur.
Logiciels commun ADSB / AIS (ADSB/AIS BOX ?)
pyAirwaves ThreeSixes airStuck
Synoptique de l'installation de test :
Le module EM-TRACK R100 recoit les informations AIS par radio, Kplex se connecte sur le port USB et stream les infos sur le réseau, on log les streams de Kplex et on affiche via OpenCPN (connecté sur le flux de Kplex) la cartographie. Conclusion: L’expérimentation sur cette session n'a pu révéler une augmentation générale de la portée avec l'altitude. Cette conclusion est basée sur l'observation des réception faites le jour même. Il reste l'analyse des logs pour confirmer. De nouveaux tests méritent d'être mis en place pour la prochaine fois et pourquoi pas tester les logiciels énumérés ci-dessus. LA région où se trouve l'Hermitage, n'est pas la meilleure pour faire de la réception AIS, très peu de bateau actif sur cette zone, il faudrait pouvoir faire des essais sur une région portuaire. Prévoir également des fonds de carte pour OpenCPN.
Log:
- Log de la station sol sur la journée de samedi : Log AIS au sol 20190720
- Log de la station ballon dans la journée de dimanche : Aucune réception.
- Log de la station sol dans la journée de dimanche : Aucune réception.
Retour au déroulé de la journée
Safety Box
Lead : 
- But : créer un réseau WIFI permettant 2 choses. La première est de fournir un wiki relatif à la survie post-catastrophe. La deuxième est de créer une fonction équivalente au “Safety Check” de Facebook.
- Scénario : lors d'une catastrophe naturelle ou événement, permettre aux victimes d'obtenir des informations sur un wiki et se signaler en vie via un court message.
- Matériel : Raspberry Pi, éventuellement une antenne WIFI pour avoir un signal plus puissant
- Raspbian L'appli Safety Box est développée par nos amis du FabLab de Jarry en Guadeloupe.
Une image est disponible ici : https://cloud.ccopol.fr/s/ewPKaGzGMT4oFXE
Cependant, plusieurs problèmes ont été rencontrés.
- Mot de passe SSH non connu. Solution : changer le mot de passe de l'utilisateur “ledoc” directement dans le fichier /etc/shadow. Commande pour générer un mot de passe : mkpasswd -m sha-512 my_password
- L'image n'a pas démarré sur un Raspi 3B+. Solution un Raspi 3A.
- Le wiki est fonctionnel mais la base de données du “Safety Check” ne l'est pas. Il n'y a pas de configuration WIFI.
- Le code du “Safety Check” est vulnérable à des injections SQL. Le projet est géré via 2 repos Gitlab.
- Un pour gérer le code source du serveur web :
https://bikagit.fr/Work/Safetybox/web
- Un pour gérer la partie OS :
https://bikagit.fr/Work/Safetybox/pi-gen/tree/RPi-Distro
Le projet semble particulièrement complexe au vu du but recherché. Une virtualisation QEMU est prévue pour réaliser les tests sans Raspi sous la main.
- Objectifs d'ici la prochaine OP :
- Faire fonctionner le “Safety Check” avec la dernière version du serveur web sur le repo Gitlab
- Configurer l'AP WIFI
- Créer une procédure d'installation simple depuis une Raspbian vierge et fournir une image utilisable. *
- Objectifs à plus long terme :
- Faire communiquer différentes Safety Box via WIFI/Lora/autre afin qu'elles puissent partager une base de données commune (Safety Check et Wiki)
- Créer une fonctionnalité permettant d'utiliser l'API Twitter afin de poster l'ensemble des messages du Safety Check, une fois qu'une connexion Internet a été retrouvée
Conclusion: Cette partie n'a pu être mise en place car ne nous disposions la connexion internet n'a permis de télécharger l'image que tard. Les différents problèmes ont ensuite retardé la mise en place. Cette expérimentation devra donc être reportée avec une meilleur préparation.
Retour au déroulé de la journée
APRS
Lead :
- But : permettre le positionnement des radioamateurs et des sources de données (météo,…), présent dans la zone de portée radio du ballon, sur un fond de carte
- Scénario : lors d'une catastrophe naturelle ou événement, géolocaliser les convois et permettre la transmission de données vers le centre de crise. Conclusion: Nous n'avons pas pu mettre en oeuvre cette partie sur le ballon. Durant le week end un Digi APRS (répéteur) à été mis en place afin de signaler la position du centre d'expérimentation avec un commentaire “#radiohermitage” Retour au déroulé de la journée
Retour au déroulé de la journée
PROGRAMME LIBRE
ATTENTION : Sous réserve d'avoir déroulé le programme prévu ou temps prévu
Relais numérique à base de MMDVM
Lead : Vivien / Fred
- But : permettre des liaisons sur zone blanche entres radioamateurs engagés dans les communications d'urgence.
- Scénario :
- Matériel :
- Rpi avec Hat MMDVM
- Duplexeur : professionnel type procom
- Antenne : simple antenne UHF de très petite taille
- transceiver : MMDVM HAT
- Poids des modules :
- Contact établie :
- Configuration retenue et testée (Ce sont les QRG à programmer dans les postes) :
- Configuration 1 :
- duplexeur
- Liste numérotée1 RX 430.300 TX 439.700 * TS : 1 * TG : 2080 (urgence fr) et/ou TG9 local * Color code : 1 * Gateway dstar ? : Proposition de programmation de canaux :
- Rx 430.300 Tx 439.700 TS 1 TG 9
Rx 430.400 Tx 439.800 TS 1 TG 9Rx 430.575 Tx 439.975 TS 1 TG 9- Rx 430.300 Tx 439.700 TS 1 TG 2080
Rx 430.400 Tx 439.800 TS 1 TG 2080Rx 430.575 Tx 439.975 TS 1 TG 2080- Rx 433.500 Tx 433.500 TS 2 TG 9
- Rx 433.500 Tx 433.500 TS 2 TG 2080
- 145.6750 - 0,6 MHz analogique (Saint Gobain)
- 145.525 analogique site
- 430.025MHz +1.6MHz TSQ 67hz Soisson linké avec les autres UHF de l'oise
Les études de cas ont pu être réalisés grâce à l'outil de Roger Coudé VE2DBE RADIO MOBILE Merci à lui pour cet outils gracieusement à notre disposition.
Dans un premier temps il était prévu d'envoyer F4EED dans un près mais dégagé des arbres. Il alors été comme sur la carte si dessous. Cependant F4EED n'est pas parvenu à entrer dans le relais. Une étude sommaire de la situation mets en évidence le relief.

Devant cet échec, sur la route retour F4EED s’arrête car il entends entrer dans le relais numérique. A cette instant il se trouvait à ce point :

On peut constater en consultant le profil ci-dessous que le l'expérience porté par EONEF apporte un grand avantage de portée.

A des fins de comparaison, nous laissons ici le profil si l'expérience n'était pas porté par EONEF.

Conclusion: La liaison n'a permis d’effectuer une distance de 2 Km entre le ballon et le portatif dans le mobile. L'utilisation d'un duplexeur semble avoir amélioré les choses par rapport à la première expérimentation mais il faut encore creuser les détails techniques pour obtenir une installation intéressante. Le système à fonctionné de manière autonome mais aussi avec une liaison internet permettant ainsi la communication avec le TG 2080 URGENCE. Un LNA en entrée du MMDVM pourrait corriger les problèmes de surdité du MMDVM, il faudra le tester lors de la prochaine expérimentation.
Retour au déroulé de la journée
Liaison Phonie (HF)
- But : permettre des liaison longue distance
- transceiver : n'importe quel poste HF (pour les test du week end nous avions un FT897
- Conclusion: La liaison par onde HF n'a pas été rendue possible.
pourquoi ?
Retour au déroulé de la journée
Antennes
Présentation d'antennes pour les situations d'urgence
Antenne NVIS
- Ressources pour l'antenne NVIS : Antenne NVIS pour le trafic d'urgence par peter DK6PW traduction Jean-Luc F1ULQ
- Conclusion: Un système d'antenne NVIS surmonté d'une antenne V/UHF de mobile à été présenté et utilisé comme station de base au hacklab. Cette station à donné des résultats satisfaisant. Le fonctionnement de la HF en mode NVIS montre que le bruit de bande est très atténué et adapté pour des liaisons moyenne distance. Il manquait d'autres station utilisant de même mode de fonctionnement afin de valider ce mode.
Antenne Canne à pèche
Conclusion: Une antenne de type canne à pêche à été mise en place afin de montrer qu'il était possible de fabriquer l'antenne avec des éléments du commerce et qu'elle est légère à transporter.
Antenne souple
Ressources pour l'antenne souple : Le site de Robert F3WM sur l'antenne pocket Le site de John VK2ZOI sur les antennes POTS-DE-FLEURS et la traduction d'une partie en français PDF Un autre article de l'antenne SKY HOOK en PDF Voici une synthèse des éléments pour en fabriquer une sur 160 MHz. J'ai réalisé un tableau avec des dimentions données pour d'autres fréquences. Avec ce tableau et les graphiques généré, j'ai pu déterminer des infos qui pourraient marcher pour la fréquence voulue. A part une exception, les données sont assez linéaires. Conclusion: 2 antennes souples ont été mises en oeuvre sur le site à l'aide de canne à pêches. Ces antennes peuvent également être déployés à l'aide de drisses lancés dans un arbre. L'une d'entre elle était accordée sur la bande 144 Mhz et à démontré qu'elle était aussi performante à 5 mètres sur une canne à pêche que la bi-bande installé sur le mât de l'antenne NVIS à 8 mètres du sol. On à pu noter qu'un point de S-metre en moins mais elle à permis de diffuser le digi-APRS et accrocher les relais et points d'accès RRF. Une deuxième antenne souple accordée dans la bande des 160 MHz à servie pour la réception AIS. Sont aspect léger et non fragile à permis de l'installer sur le ballon.

Retour au déroulé de la journée
Camera HD via Wifi
Lead :
- But : Avoir un visuel sur la zone couverte par le ballon et repérer divers éléments (corps, voiture…)
- Scénario :
- Matériel :
- Borne Wifi TP-Link,
- Batterie USB (2 Ports :5V,1A et 5V,2A),
- Ordinateur ou téléphone pour la réception des images
- Antenne : Antenne WIFI 802.11n
- Réseau déployé : Réseau WIFI via borne wifi TP-Link embarquée
- Logiciel : Wanscam (iOs) ou Interface WEB
- Poids des modules : 500g (Caméra), 400g (Batterie), 300g (Borne Wifi)
- Portée de réception : 100m < x < 150m
- Avantages : Large champ de vision, Commande à distance la caméra pour se déplacer dans le champ de vision, repérage d'éléments dans le paysage, Surveillance aérienne d'une zone * Inconvénients : Difficultés de stabilisation de l'image dues aux mouvements du ballon, Perte de signal au delà de 150m d'altitude
- Mode opérationnel :
- Paramétrer la borne WIFI afin de diffuser un SSID
- Faire un reset usine de la caméra si déja paramétrée sur un autre réseau
- Connecter votre téléphone au SSID
- Connecter la caméra en Ethernet à la borne WIFI
- Allumer la caméra et attendre qu'elle s'initialise
- Télécharger l'application WANSCAM sur iOs ou Android
- Ouvrir l'application et ajouter une nouvelle caméra
- Scanner le QR code de la caméra et valider son ajout en appuyant sur “Terminer”
- Allez dans les paramètres de la caméra et ajouter, dans la section “Réseau WIFI” le SSID et le Mot de Passe du SSID
- Déconnecter le câble ethernet de la caméra et vérifier que celle ci est bien accessible via WIFI en essayant d'y accéder par l'application
- Débrancher la caméra
- Vérifier la charge de la batterie
- Brancher la caméra sur le port 2A de la batterie
- Brancher la borne WIFI sur le port 1A de la batterie
- Intégrer les équipements dans un boitier fixé sous le ballon
- Fixer la caméra sous le boitier accroché au ballon
- Déployer le ballon
- Se connecter au SSID diffusé par la borne WIFI avec l'application et piloter à distance la caméra !!! Possibilité d'accéder à la caméra via un ordinateur et interface WEB si adresse IP de la caméra connue et ordinateur connecté au même SSID que la caméra !!! Conclusion: